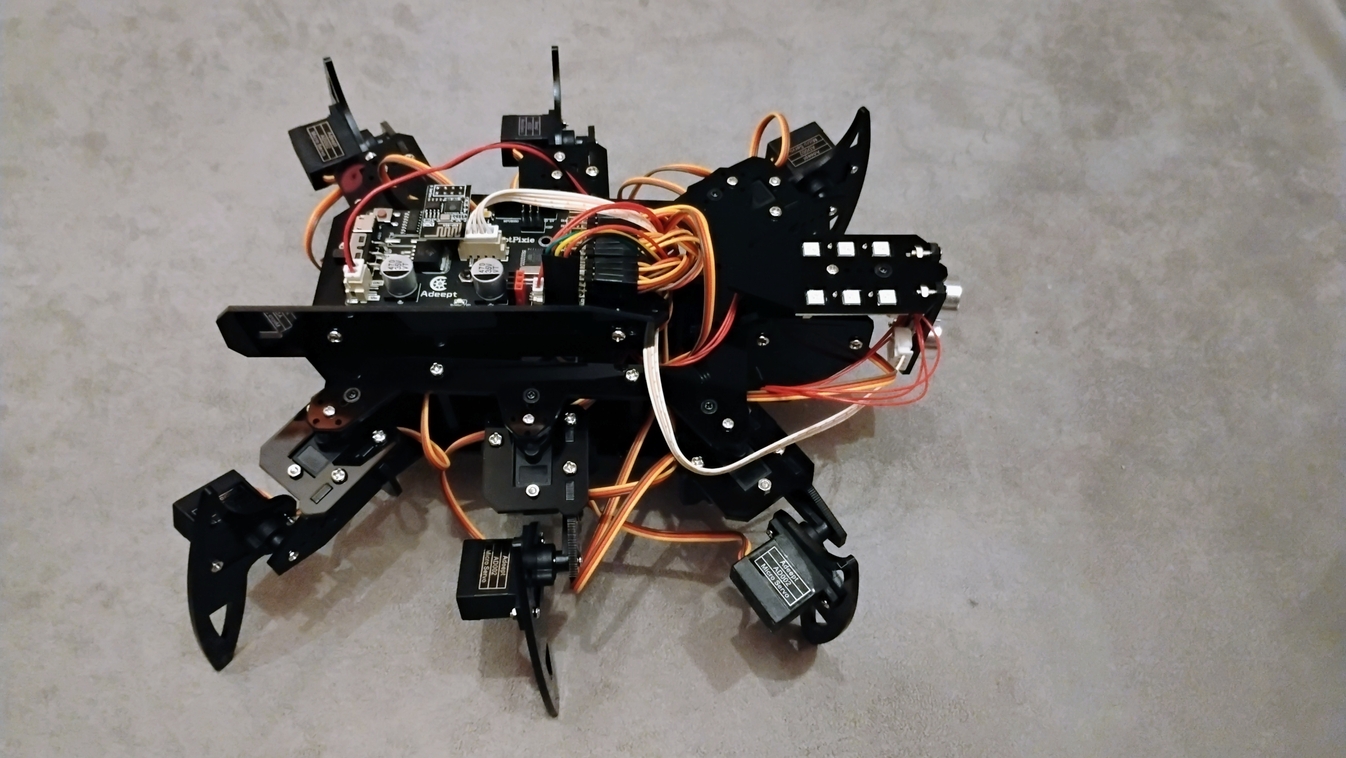
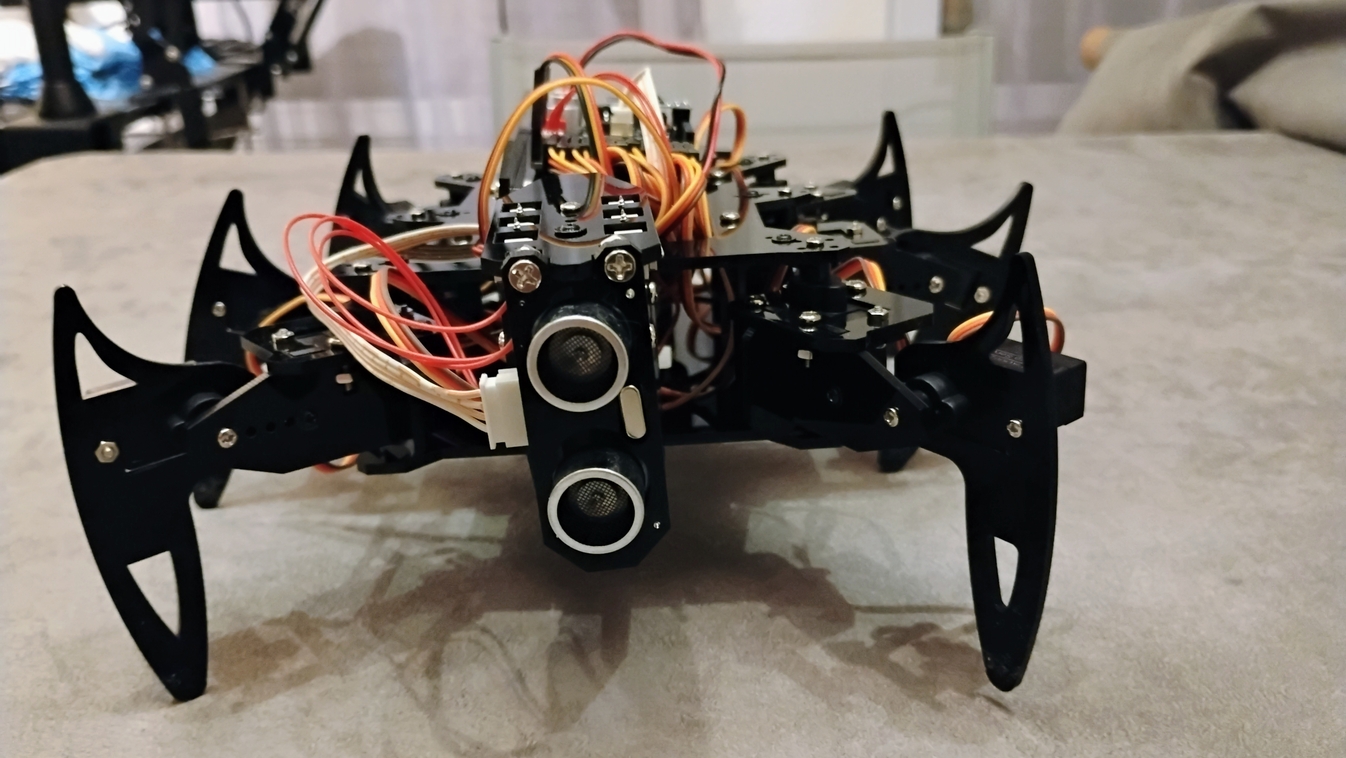
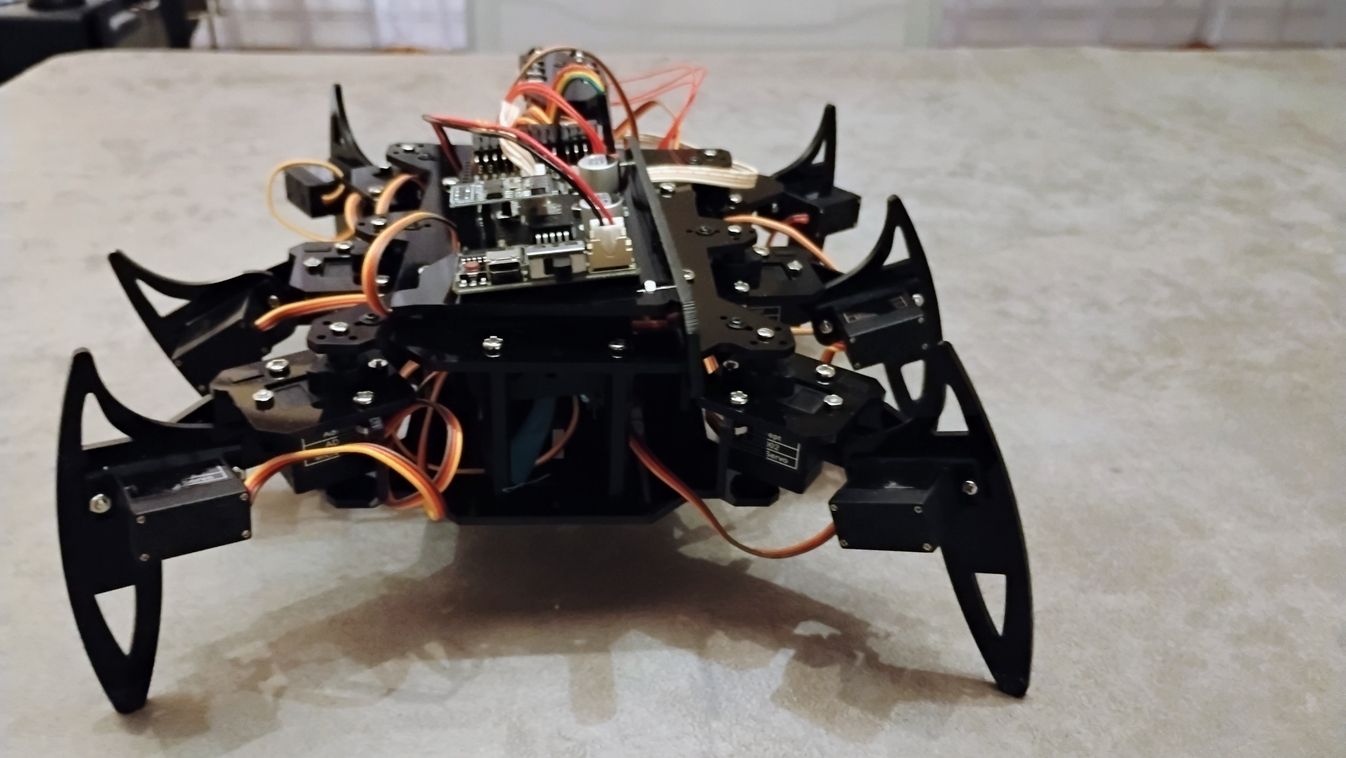
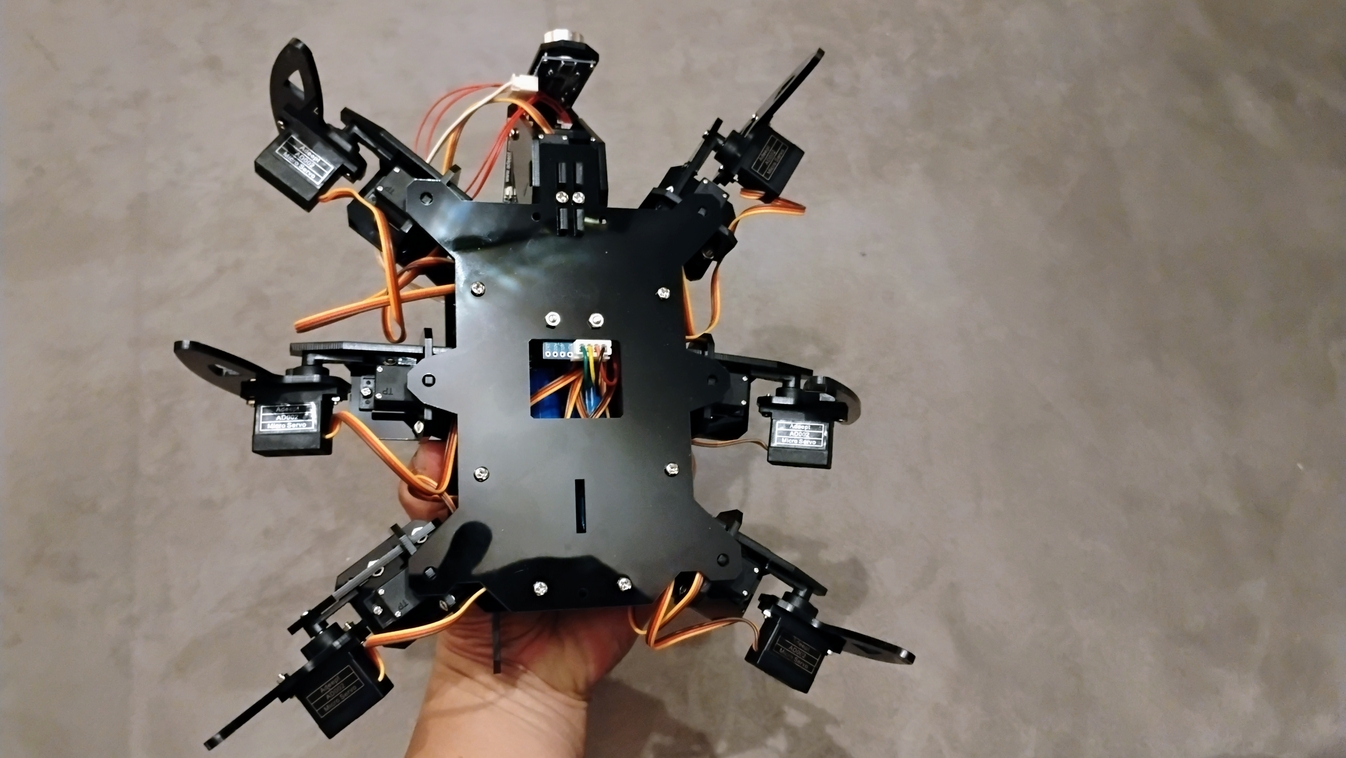
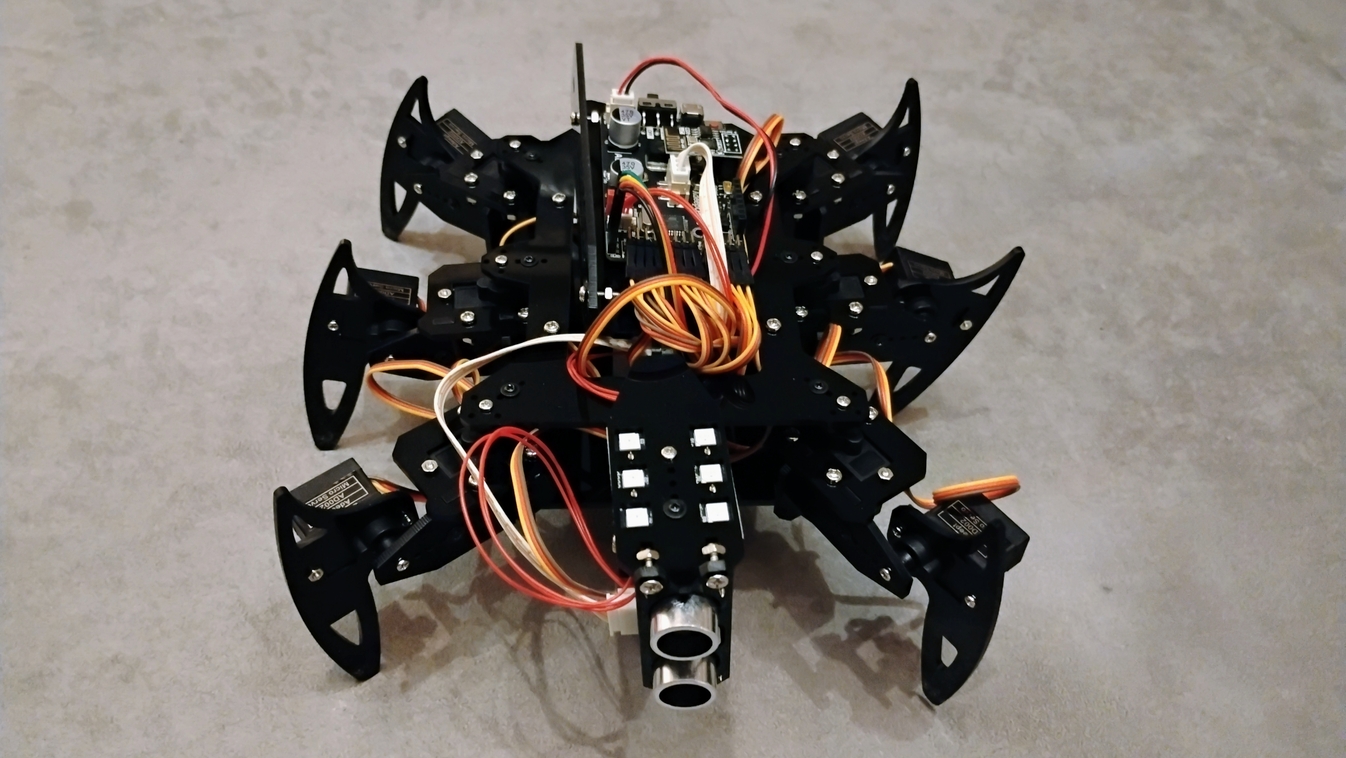
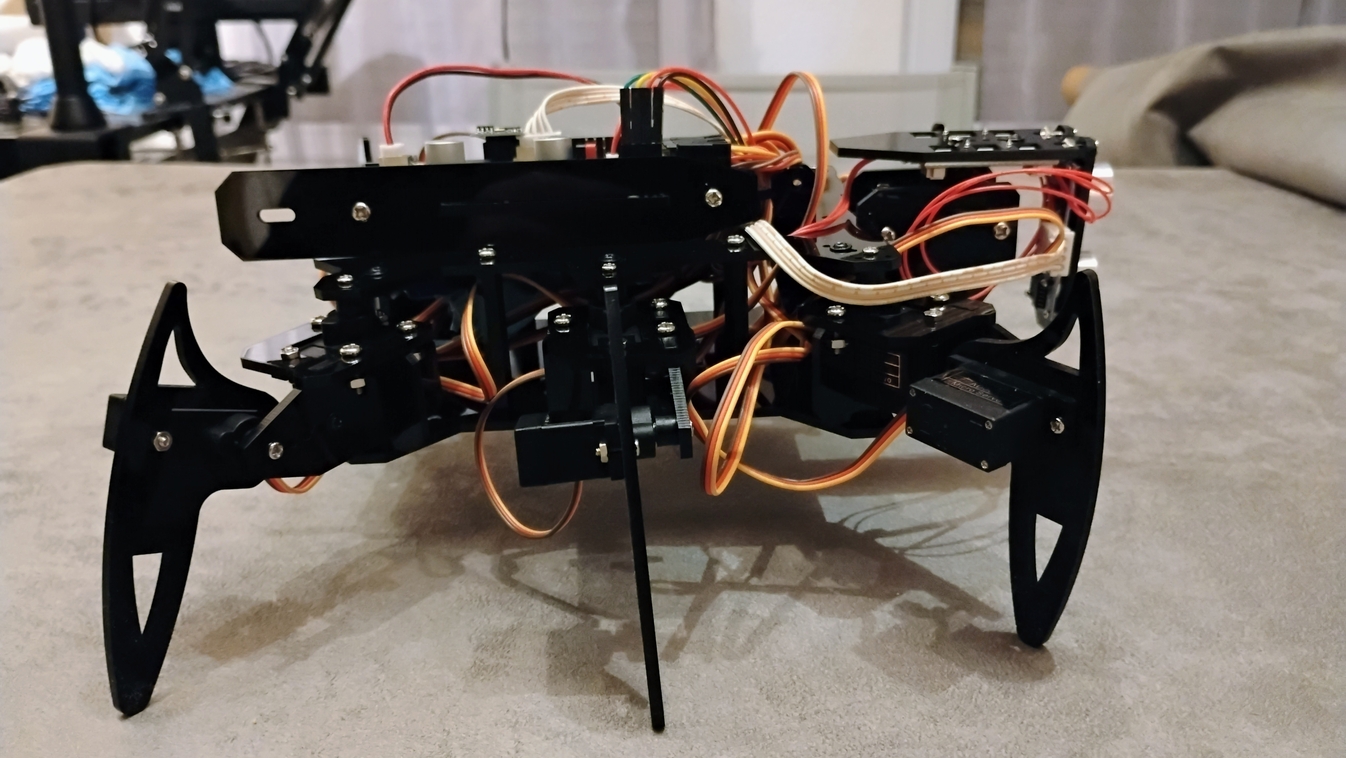
Hexapod Spider Robot Kit for Arduino
Liens :
- Amazon : https://www.amazon.fr/gp/product/B086HJJWGV/ref=ox_sc_act_title_1?smid=A25R4KS2AL1P7J&psc=1
- Site officiel : https://www.adeept.com/hexapod-spider-robot-v30_p0130.html
- Ressource : https://www.adeept.com/learn/detail-70.html
Distribution de travail : Lubuntu 24.04
I/ Montage du robot.
Cf. : Le manuel
II/ Configuration de l'IDE Arduino
1/ Lancement de l'IDE Arduino.
util01@station54:~$ cd ARDUINO/arduino-ide_2.3.2_Linux_64bitutil01@station54:~/arduino-ide_2.3.2_Linux_64bit$ /arduino-ide2/ Choisir le carte de type.
Menu [Tools][Board][Arduino AVR Boards] : Arduino Uno3/ Choisir le port.
Menu [Tools][Port] : /dev/ttyUSB04/ Connecter le robot à l'ordinateur via un câble USB.
5/ Flasher l'Arduino Uno.
-
Positionner l'interrupteur [Upload] à : 0
-
Ouvrir le sketch '.ino' :
- Librairie Hexapod modifié :
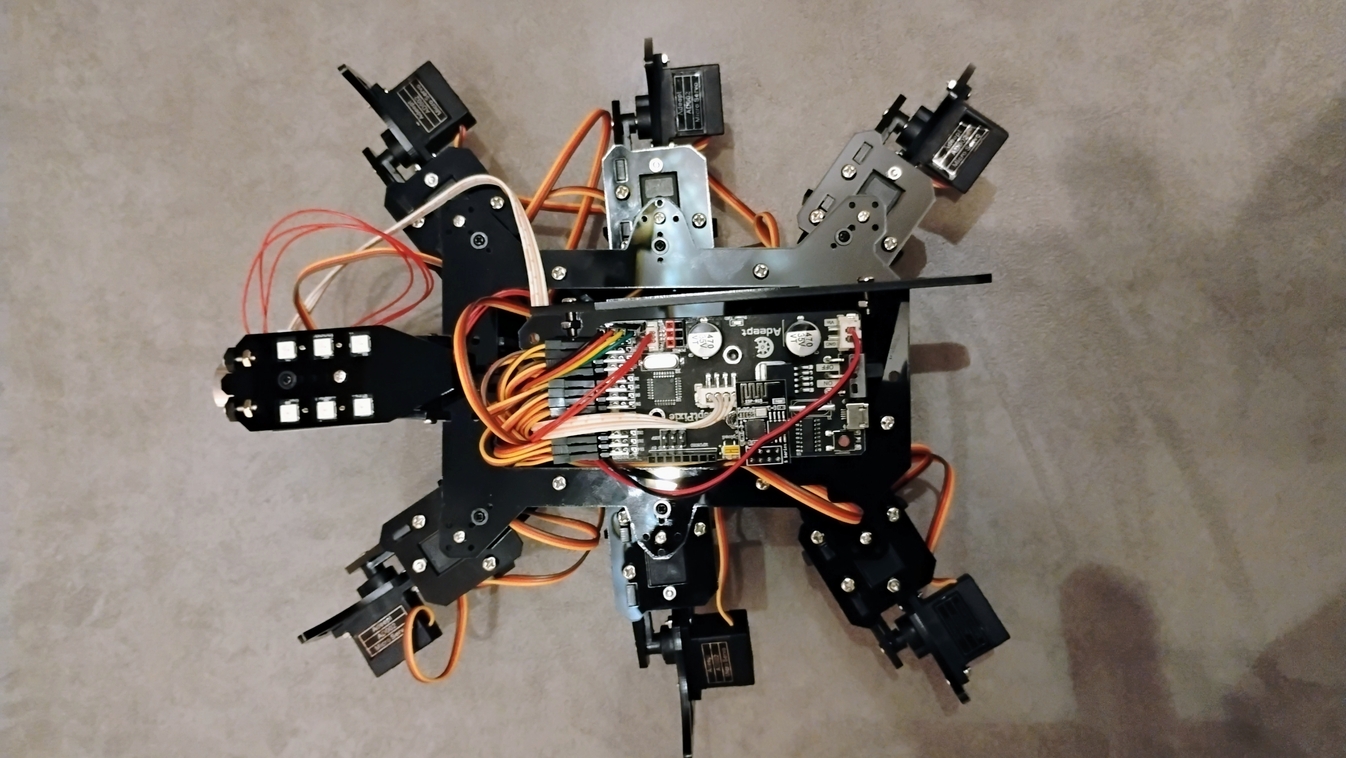
La carte Pixie est basé sur Arduino Uno, cette carte gère seulement 12 servo-moteurs mais, bizarrement, il y a 13 connecteurs sur cette carte.
Selon cette publication, c'est une erreur de conception de la part de Adeept :
https://forum.dronebotworkshop.com/motors/adeept-hexapod-kit-ada033-thirteenth-servo-will-not-attach/paged/4/#post-25448
La tête (Head) géré par le servo-moteur 11 et est connecté sur la broche D14 ne peut donc pas être géré
Dans le code suivant : https://github.com/HackTechDev/hexapod_lib_arduino_v3/blob/master/hexpod.cpp
J'ai désactivé le code pour la gestion du servo-moteur Leg6. Le servo-moteur de la tête est connecté sur le connecteur D13.
Fichier 'hexpod.cpp' à copier dans le répertoire :
~/Arduino/library/hexpod/- Compiler le programme :
[Sketch][Verify/Compile]
- Envoyer le programme vers l'Arduino :
[Sketch][Upload]
-
Repositionner l'interrupteur [Upload] à : 1
-
Redémarrer la carte, appuyer sur le bouton [RESET]
III/ Télécommander le robot.
1/ Création du répertoire de travail
util01@station54:~$ mkdir HEXAPODutil01@station54:~$ cd HEXAPOD/
util01@station54:~/HEXAPOD$ 2/ Scanner les réseaux sans-fil.
util01@station54:~/HEXAPOD$ nmcli connection show
NAME UUID TYPE DEVICE
ressf01 0af28875-e2cf-4ac1-98d1-09f279fe50ac wifi wlo1
lo 2912e8f7-46c8-44ac-8272-b5171e94d58f loopback lo
Adeept_ESP 03b85917-fd1b-4665-aeba-a926e289980a wifi --
Connexion filaire 1 d5e5983b-124e-39f7-84e8-3644c66362eb ethernet --
...
util01@station54:~/HEXAPOD$ 3/ Allumer l'hexapod.
Le réseau wifi de l'hexapod est : Adeept_ESP
Avec le mot de passe : 12345678
4/ Se connecter sur le réseau wifi de l'hexapod.
util01@station54:~/HEXAPOD$ nmcli device wifi connect "Adeept_ESP" password 12345678
Périphérique « wlo1 » activé avec « 03b85917-fd1b-4665-aeba-a926e289980a ».
util01@station54:~/HEXAPOD$ Il se peut qu'il faille exécuter la commande plusieurs fois afin que la connexion wifi s'établisse correctement.
5/ Vérification.
util01@station54:~/HEXAPOD$ nmcli connection show
NAME UUID TYPE DEVICE
Adeept_ESP 03b85917-fd1b-4665-aeba-a926e289980a wifi wlo1
lo 2912e8f7-46c8-44ac-8272-b5171e94d58f loopback lo
Connexion filaire 1 d5e5983b-124e-39f7-84e8-3644c66362eb ethernet --
ressf01 0af28875-e2cf-4ac1-98d1-09f279fe50ac wifi --
...
util01@station54:~/HEXAPOD$ 6/ Télécharger le code source Python de la télécommande.
https://github.com/HackTechDev/hexapod_v3
7/ Lancer la télécommande de l'hexapod.
util01@station54:~/HEXAPOD$ sudo python3 remotecontrol.py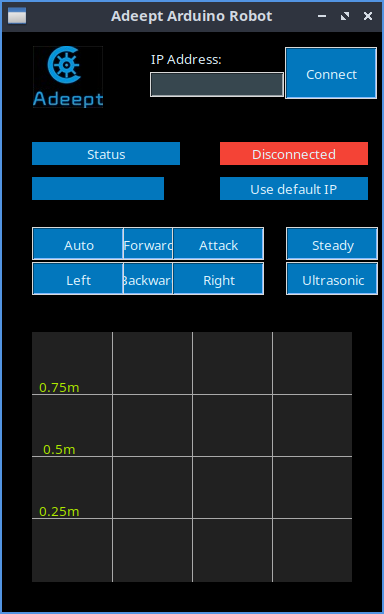
8/ Se connecter au robot.
Le bouton [Disconnected] est en rouge.
Cliquer sur le bouton [Connect].
Au bout de quelques secondes, le bouton [Connected] devient vert.
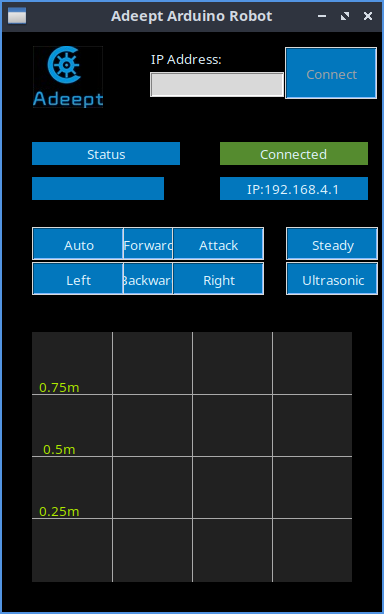
9/ Les déplacements.
[Forward] : Pour avancer
[Backward] : Pour reculer
[Left] : Pour tourner vers la gauche
[Right] : Pour tourner vers la droite
[Steady] : Pour être en repos